هوای فشرده چگونه باعث حرکت رباتها میشود
هوای فشرده چگونه باعث حرکت رباتها میشود این نیرو چه مزایایی دارد و کاربرد آن چیست.
هوای فشرده چگونه باعث حرکت رباتها میشود؟
چرا اصلاً از هوای فشرده در رباتها استفاده میشود؟
در نسل جدید رباتهای صنعتی و سیستمهای اتوماسیون، طراحان ماشین (Machine Designers) بهشدت به سمت سیستم های پنوماتیک رفتهاند؛ یعنی سیستمهایی که با هوای فشرده کار میکنند. طبق مقالهی Kaishan USA با عنوان
“The Role of Compressed Air in Robotics and Automation” (2025)، دلیل این گرایش چند نکته مهم است:
- قدرتمند (Strong): عملگرهای (Actuators) پنوماتیک در ابعاد مشابه، گشتاور و نیروی بالاتری نسبت به بسیاری از محرکهای الکتریکی ارائه میکنند.
- سبک (Lightweight): نیازی به موتور و باتری روی خود عملگر نیست؛ انرژی در قالب هوای فشرده از بیرون تأمین میشود، پس بازوها و ابزار انتهایی سبکتر میشوند.
- کوچک (Small): برای طراحیهای فشرده (مثلاً در خطوط مونتاژ الکترونیک، نیمههادی و Pick-and-Place) مزیت بزرگی است.
- سریع (Fast): پاسخ تقریباً آنی، سرعت رفت و برگشت بالا، و RPM بالاتر نسبت به عملگرهای الکتریکی همسایز؛ این ویژگی در **اتوماسیون با سرعت بالا** حیاتی است.
- انعطافپذیر، دقیق (در صورت استفاده از کنترل الکترونیکی مناسب)، و همهکاره (Versatile)
- حساس (Sensitive): هوای فشرده مانند یک **بالشتک (Cushion)** عمل میکند و ضربه را نرم میکند؛ برای جابجایی قطعات شکننده در صنایع الکترونیک و دارویی مهم است.
از نگاه کاربر نهایی نیز، مزایای اقتصادی و ایمنی مهماند:
- ایمنی بالا: در صورت نشت، فقط هوا خارج میشود؛ خبری از ریسک برقگرفتگی، نشت روغن، یا سطوح لغزنده نیست.
- هزینه اولیه پایین: طبق Kaishan، هزینه اولیهی سیستمهای پنوماتیک معمولاً کمتر از سیستمهای هیدرولیک و الکترومکانیکی مشابه است.
اما سؤال اصلی این است: این هوای فشرده دقیقاً چطور حرکت ربات را ایجاد میکند؟
مسیر انرژی: از کمپرسور تا مفصل ربات
برای اینکه بفهمیم «هوای فشرده چگونه باعث حرکت رباتها میشود؟»، باید زنجیرهی انرژی را قدمبهقدم ببینیم:
1.تولید هوای فشرده (Air Compressor):
یک کمپرسور صنعتی، هوا را از محیط میمکد و با فشار بالاتر (مثلاً ۶–۸ بار) در مخزن ذخیره میکند.
2. تهویه و آمادهسازی هوا (FRL – Filter, Regulator, Lubricator):
- فیلتر (Filter): ذرات و رطوبت را تا حد ممکن حذف میکند (طبق هشدار Standard Bots، رطوبت دشمن سیستم پنوماتیک است).
- رگلاتور (Regulator): فشار را در محدودهی طراحی عملگر تنظیم میکند.
- در صورت نیاز، روغنزن (Lubricator): برای کاهش اصطکاک قطعات داخلی.
3.شبکه توزیع (Piping & Tubing):
هوای فشرده از طریق لولهها و شیلنگها به نزدیکی ربات میرسد.
4. واحدهای کنترل (Solenoid Valves، Manifolds):
شیرهای برقی (Solenoid Valves) طبق فرمان PLC یا کنترلر صنعتی، مسیر عبور هوا را «باز» یا «بسته» میکنند.
5. ورود هوا به عملگر پنوماتیک (Actuator):
اینجاست که هوای فشرده، انرژی خود را به حرکت مکانیکی تبدیل میکند.
عملگرهای پنوماتیک چگونه کار میکنند؟
طبق مقالهی RealPars – “Pneumatic Actuators: How They Work & Key Applications”، عملگرهای پنوماتیک وظیفه دارند:
> انرژی ذخیرهشده در هوای فشرده را به حرکت خطی یا دورانی تبدیل کنند.
دو نوع اصلی عملگر داریم:
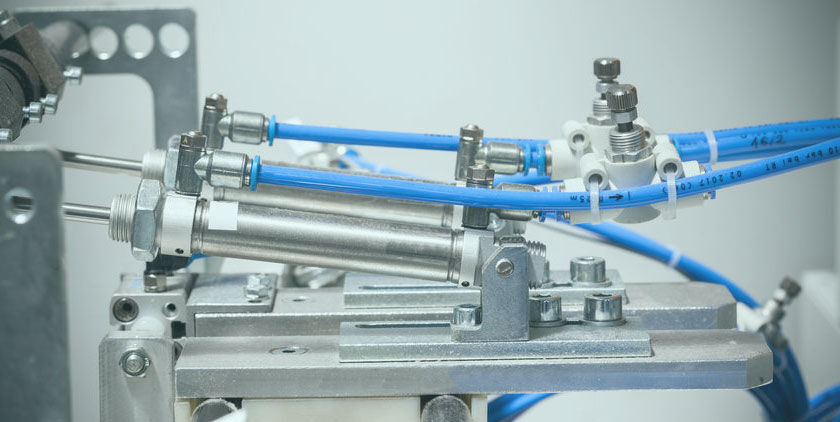
عملگر خطی (Linear Pneumatic Cylinder)
- سادهترین تصویر: یک سیلندر، یک پیستون، دو محفظه.
- وقتی شیر برقی، هوای فشرده را به سمت انتهای سیلندر هدایت میکند:
- فشار هوا روی سطح پیستون اعمال میشود.
- پیستون به سمت جلو حرکت میکند.
- میلهی پیستون (Piston Rod) بیرون میآید و حرکت خطی تولید میشود.
- وقتی مسیر هوا برعکس شود:
- هوای سمت جلو تخلیه و هوای فشرده به سمت پشت پیستون وارد میشود.
- پیستون عقب میرود و میله جمع میشود.
این حرکت خطی، در ربات میتواند کارهای زیر را انجام دهد:
- باز و بسته کردن گیره (Gripper) برای گرفتن قطعات (Pick-and-Place)
- حرکت خطی یک محور در رباتهای کارتیزین
- فشار دادن، پانچ کردن، یا قرار دادن قطعات روی هم
عملگر دورانی (Rotary Actuator)
برای چرخش مفاصل به کار میروند. طبق RealPars، یکی از رایجترین مکانیزمها:
Rack and Pinion:
حرکت خطی پیستون، بهوسیلهی یک دندانه شانهای (Rack)، به چرخش یک چرخدنده (Pinion) تبدیل میشود.
بدین ترتیب، هوای فشرده منجر به چرخش مفصل میشود (مثلاً چرخش ۹۰ یا ۱۸۰ درجه یک بازو).
بنابراین:
هوای فشرده، با فشار روی پیستون یا دیافراگم داخل عملگر، نیروی مستقیم تولید میکند و این نیرو، از طریق مکانیزمهای خطی یا دورانی، به حرکت مفاصل و ابزار ربات تبدیل میشود.
نقش سیستم کنترل: از هوای خام تا حرکت دقیق ربات
طبق مقالهی Standard Bots – “What is a Pneumatic robot arm? Explainer”، بازوی رباتیک پنوماتیک معمولاً سه بخش اصلی دارد:
1. عملگرهای پنوماتیک (Pneumatic Actuators):
منبع اصلی نیرو و حرکت.
2. سنسورها (Sensors):
- سنسور موقعیت (Position)
- سنسور فشار (Pressure)
- سنسور نیرو/گشتاور (Force/Torque)
3. سیستم کنترل (PLC یا Industrial PC):
مغز سیستم؛ فرمان میدهد، بازخورد میگیرد، و دوباره فرمان را اصلاح میکند.
حلقهی کاری بهشکل ساده:
1. برنامهی کنترل (PLC Program) تصمیم میگیرد:
«گیره باز شود»، «محور X به جلو برود»، «مفصل ۲، ۴۵ درجه بچرخد».
2. PLC بر اساس این دستور:
- ولتاژ یا سیگنال کنترلی را به شیرهای برقی (Solenoid Valves) میفرستد.
- شیرها مسیر هوای فشرده را به یکی از ورودیهای عملگر باز/بسته میکنند.
3. عملگر، با ورود یا خروج هوا شروع به حرکت میکند.
4. سنسورها، اطلاعات جدید (مثلاً رسیدن به انتهای کورس، فشار کافی، یا موقعیت) را به PLC باز میفرستند.
5. PLC با توجه به این بازخورد، فرمان بعدی را تنظیم میکند (مثلاً قطع جریان هوا، تغییر وضعیت شیر، یا توقف حرکت).
نکته مهم:
در بسیاری از سیستمهای پنوماتیک سنتی، شیرها عمدتاً بهصورت باینری (روشن/خاموش) عمل میکنند. طبق Standard Bots، این موضوع سبب میشود:
- مدولاسیون سرعت و موقعیت بهصورت پیوسته (مثل سروو موتورهای الکتریکی) محدود باشد.
- برای دقتهای خیلی بالا، از ترکیب سنسورها، شیرهای تناسبی (Proportional Valves) و تکنیکهای کنترلی پیشرفته استفاده میشود، ولی هزینه را بالا میبرد.

چرا رباتهای پنوماتیک در اتوماسیون صنعتی محبوباند؟
بر اساس مجموع مطالب Kaishan، Standard Bots و RealPars، استفاده از هوای فشرده در رباتها در این موارد بسیار رایج است:
- رباتهای Pick-and-Place با سرعت بالا
جابجایی سریع قطعات از یک نقطه به نقطهی دیگر در:
- صنایع الکترونیک و نیمههادی
- بستهبندی مواد غذایی و دارویی
- گیرهها (Grippers) و اندافکتورها (End Effectors)
گرفتن، نگه داشتن، و رها کردن قطعات، مخصوصاً در:
- خطوط مونتاژ
- بستهبندی
- لحیمکاری و مونتاژ PCB (طبق اشاره Standard Bots، کاربردهای تکراری و دقیق)
- کاربردهای آموزشی و تحقیقاتی
بهدلیل ساختار ساده، ایمن و قابلدرک برای دانشجویان و پژوهشگران.
- کاربردهای پزشکی و کشاورزی دقیق
بهخاطر امکان ایجاد تماس موقر و نرم با محیط و نمونهها.
جمعبندی: پاسخ عملی به سؤال «هوای فشرده چگونه باعث حرکت رباتها میشود؟»
اگر بخواهیم کل بحث را در یک زنجیرهی ساده و کاربردی جمع کنیم:
1. تولید انرژی:
کمپرسور، هوای محیط را فشرده میکند و در مخزن ذخیره میشود.
2.آمادهسازی و انتقال:
- هوا فیلتر، تنظیم فشار و (در صورت نیاز) روغنکاری میشود و از طریق لولهها به نزدیک ربات میرسد.
3. کنترل مسیر هوا:
- PLC یا کنترلر صنعتی، بر اساس برنامه و سیگنال سنسورها، به شیرهای برقی فرمان میدهد که کدام مسیر هوا باز یا بسته شود.
4. تبدیل انرژی به حرکت:
- هوای فشرده وارد محفظههای عملگر (سیلندر خطی یا عملگر دورانی) میشود.
- فشار هوا، پیستون یا دیافراگم را جابهجا میکند.
- این جابهجایی، بهصورت مستقیم یا از طریق مکانیزمهایی مثل Rack & Pinion، به حرکت مفصل یا گیره ربات تبدیل میشود.
5. بازخورد و اصلاح حرکت:
- سنسورها موقعیت، فشار و نیرو را گزارش میکنند.
- کنترلر، فرمانها را اصلاح میکند تا ربات دقیقاً کار مورد نظر (مثلاً گرفتن یک قطعه و قرار دادن آن در محل مشخص) را انجام دهد.
نتیجه:
هوای فشرده، در واقع سوخت مکانیکی رباتهای پنوماتیک است؛ شبیه بنزین برای موتور احتراق داخلی، اما پاکتر، ایمنتر و در بسیاری از کاربردهای صنعتی، سریعتر و سادهتر در استفاده.
این مطلب تبلیغاتی و از سوی سفارش دهنده تهیه شده است و هممیهن آنلاین مسئولیتی درباره چارچوب و محتوای آن ندارد.



